Ordinary & Partial Differentiation
| Created | |
|---|---|
| Last Edited Time | |
| By | Borhan<NSTU> |
References:
- Daffodil International University, BD (https://elearn.daffodilvarsity.edu.bd/course/view.php?id=6323#)
- [Initial Value Problem, IVP]https://resources.saylor.org/wwwresources/archived/site/wp-content/uploads/2011/04/DIFFERENTIAL-EQUATIONS-AND-INITIAL-VALUE-PROBLEMS.pdf\
- Dr. Gajendra Purohit
- National Open University of Nigeria (Math Book) https://nou.edu.ng/coursewarecontent/MTH232.pdf
- Blackpenredpen
- TheOrganicChemistryTutor
- Udvash Engineering Concept Book
- Wikipedia
- Byjus
Integration Formulae and tricks
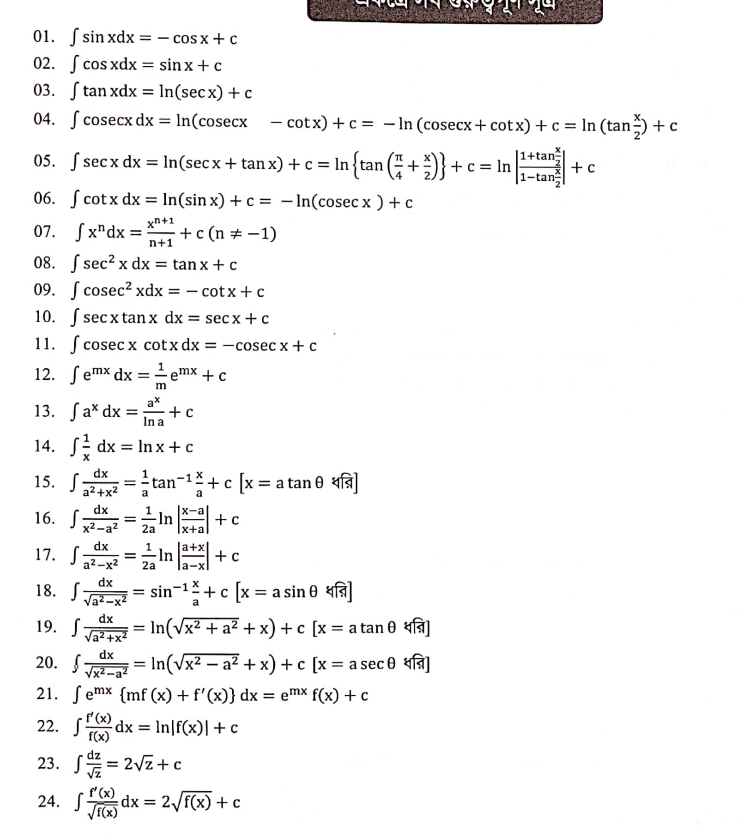
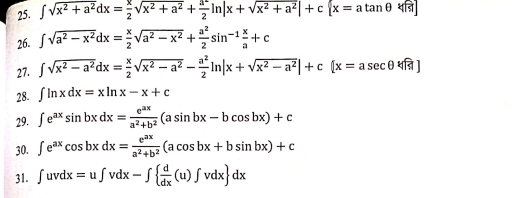
Credit: Udvash Engineering Concept Book
Definition of Differential :
- involving derivatives of one or more dependent variable w.r.t one or more independent variable
Dependent/Independent Variable:
x = independent
y= dependent (y depends on x, y is a function of x)
Types :
- Ordinary Diff. : If independent variable is one
- Partial Diff : If independent variables are > one
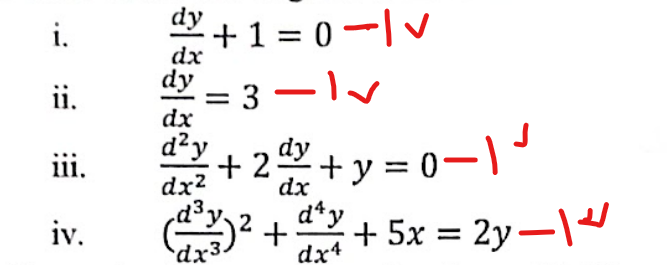
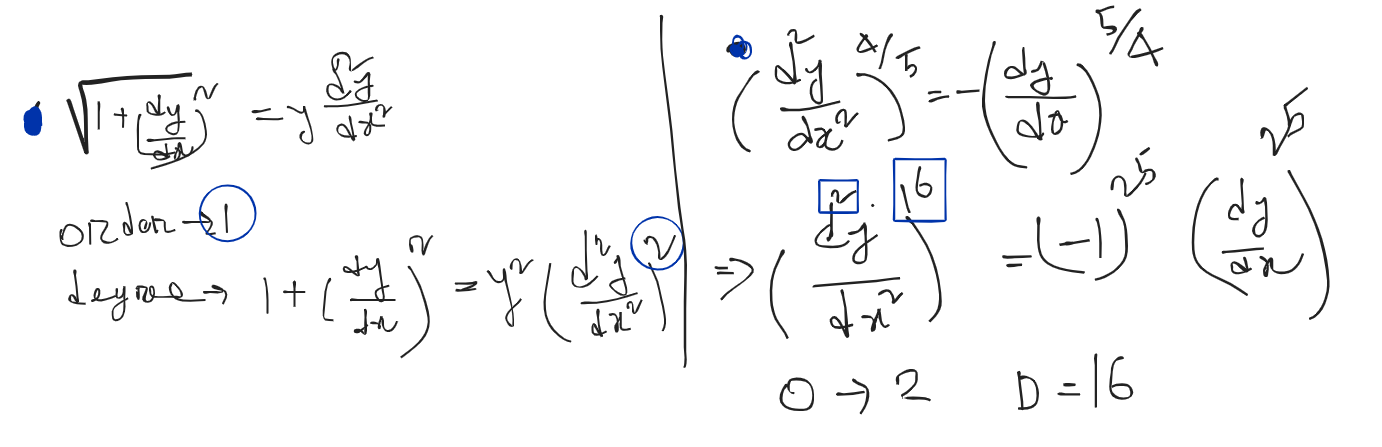
Order:
- Highest order derivative
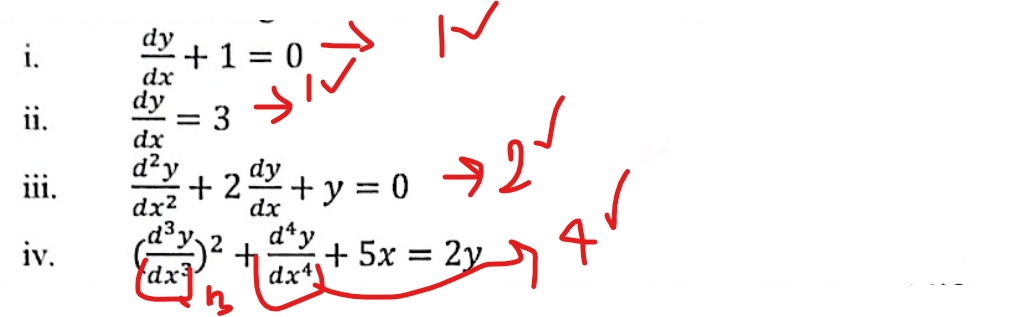
Degree:
- Highest order derivative’s power
- Degree can’t be fractional, so if there’s any fractional variable or derivatives (not only the highest derivative, it is applicable for all variables) we need to make it integer first.
→ How ? → Squaring, cubing…^n-ing the whole equation
Problems:
NB: Don’t define degree if , first make it like multiple of , for the example.
Transcendental Function:
Definition: In mathematics, when a function is not expressible in terms of a finite combination of algebraic operation of addition, subtraction, division, or multiplication raising to a power and extracting a root…
Keywords: function which are return a infinite series
- If any derivative locates like this sin(derivative function), cos(derivative function), e^(derivative function), then the degree will be undefined.
Example:
1)
Order : 1
Degree : Undefined
2)
Order : 2
Degree : Not defined
3)
Order : 3
Degree : 1 (No derivative function in the )
Wronskian Theorem:
Let and are two solution of second order linear differential equation then Wronskian of is
→ Linearly Dependent Solution
→ Linearly Independent Solution
If there’re , then the equation will be like below
Linear Differential Equation:
- m must be 1
- There will be no , ,
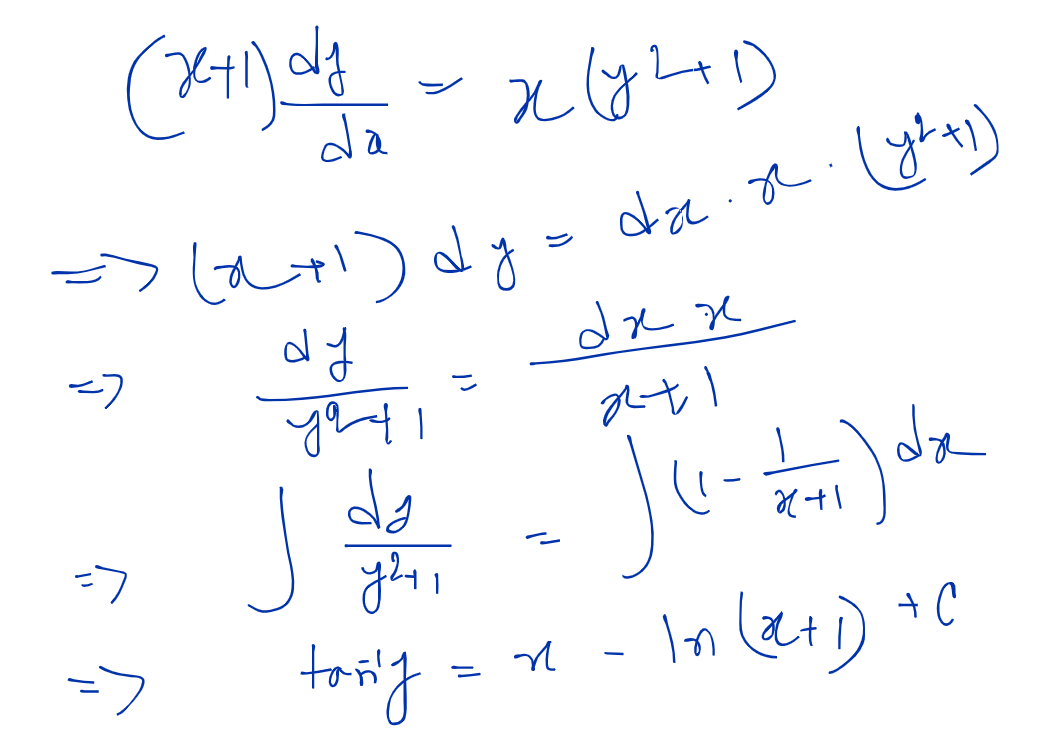
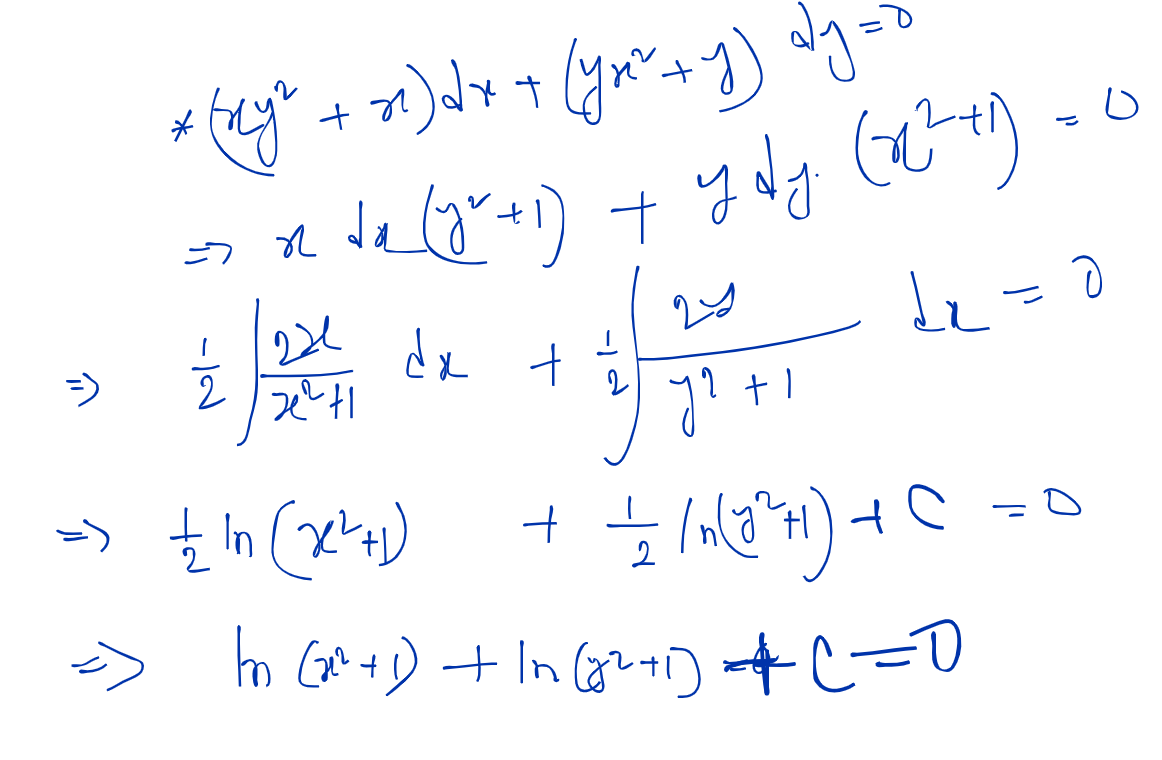
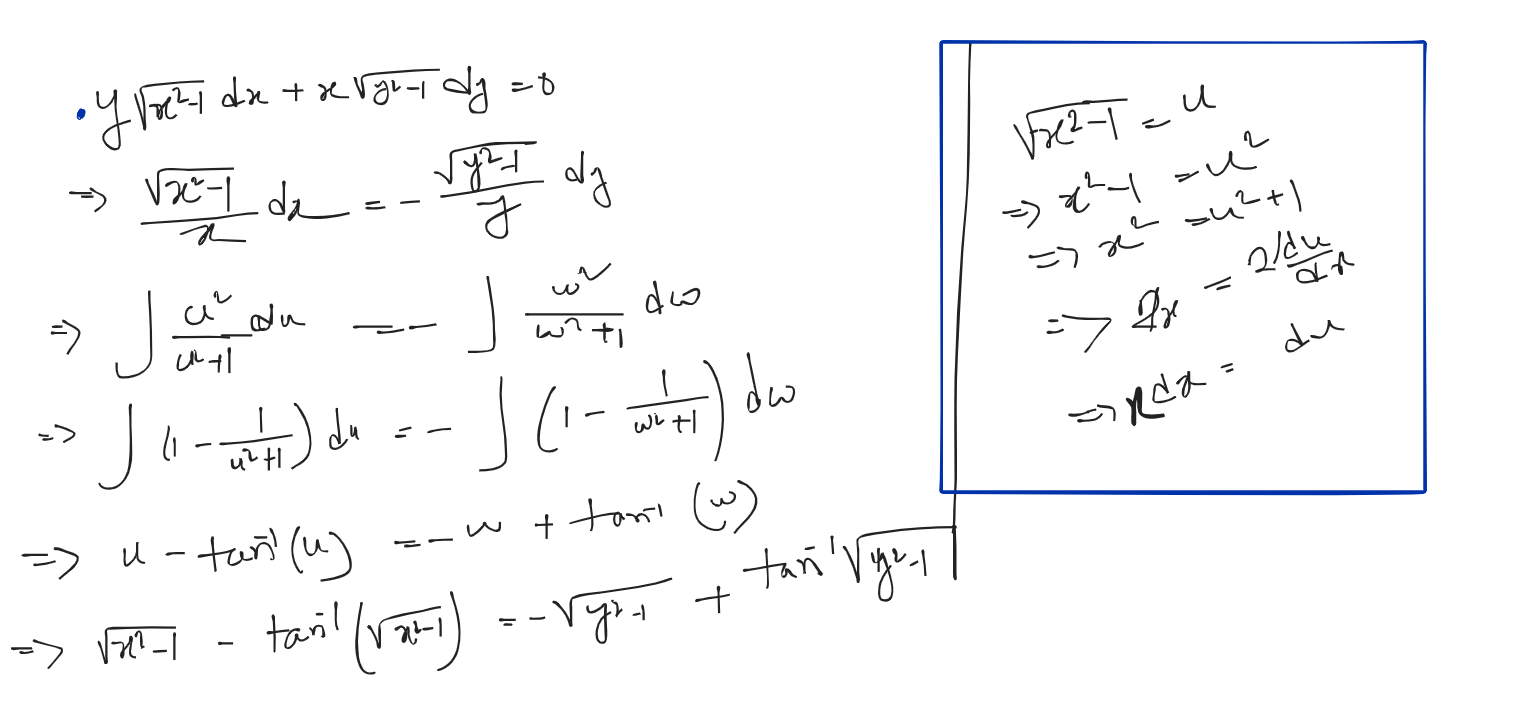
Variable Separable Method:
Steps:
- Make the equation like that f(x) = f(y)
- Integrate it
Problems:
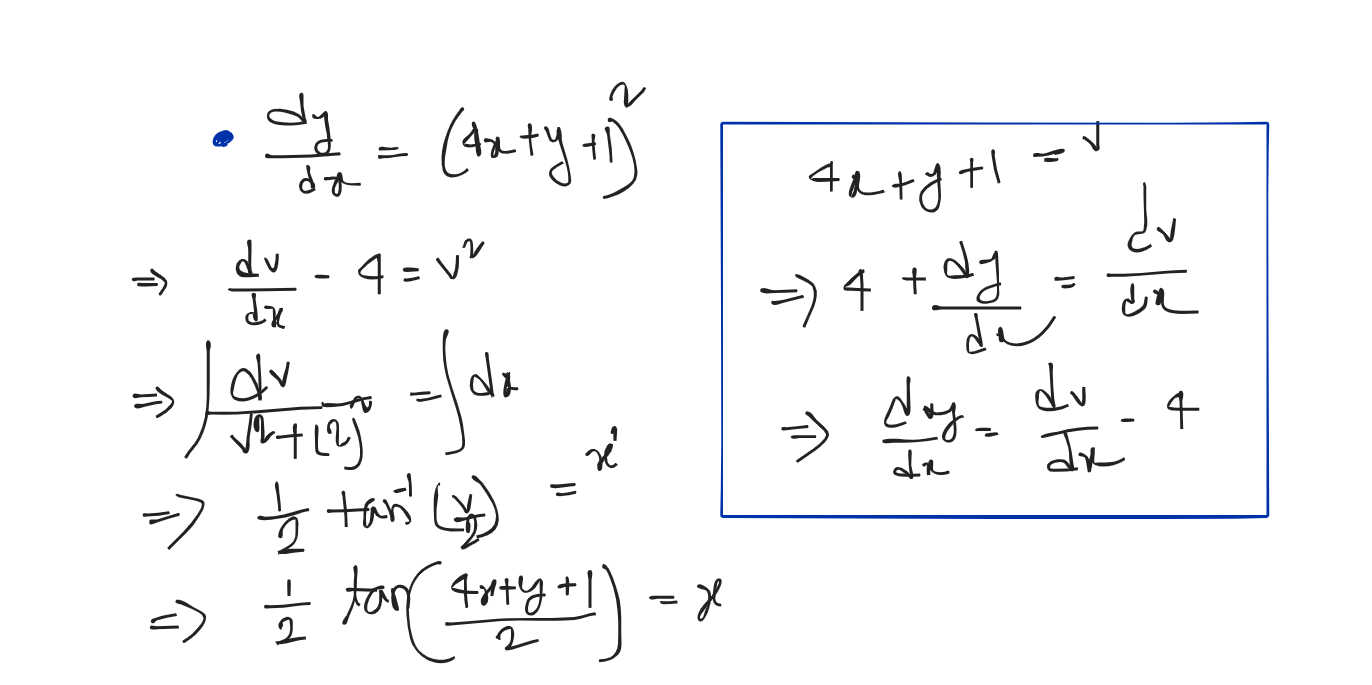
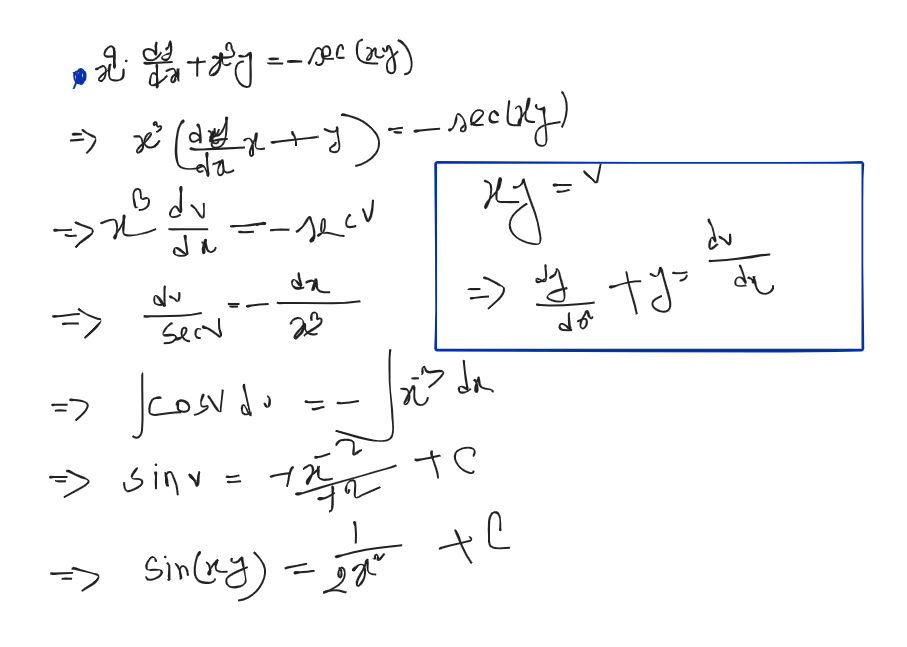
Reducible to Variable Separable Method:
If the equation like that,
C may be 0.
or something else to solve the problem
.. (ii)
Put from (ii) value in (i) and
Trick: term which one is repeated more than one = v
Problems:
Mistake :
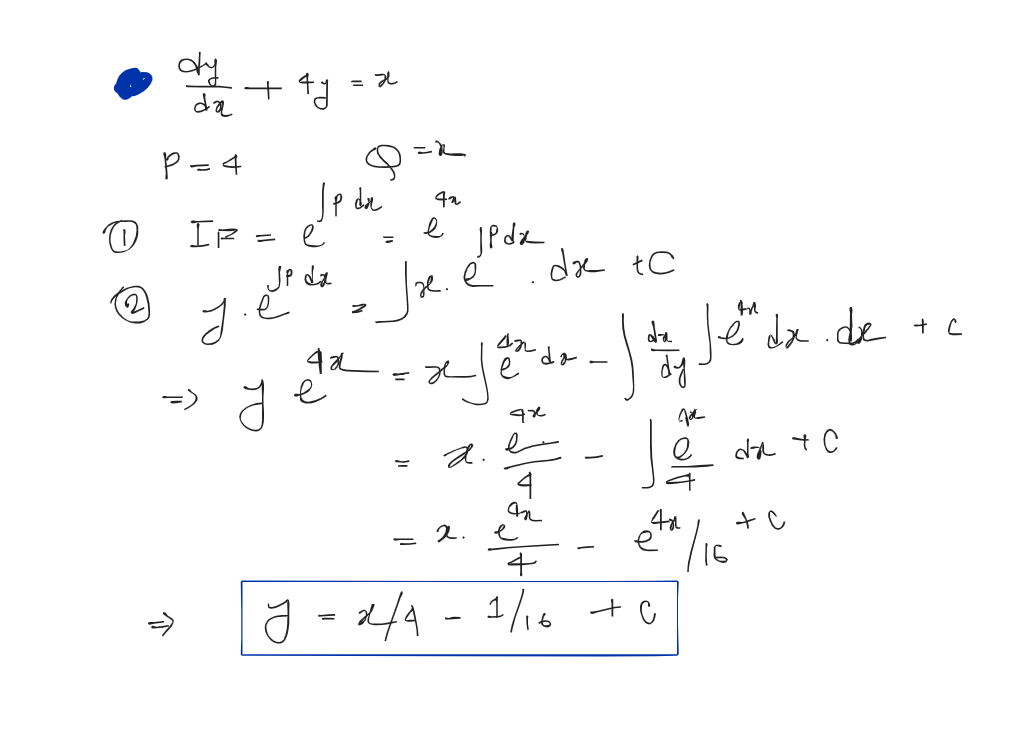
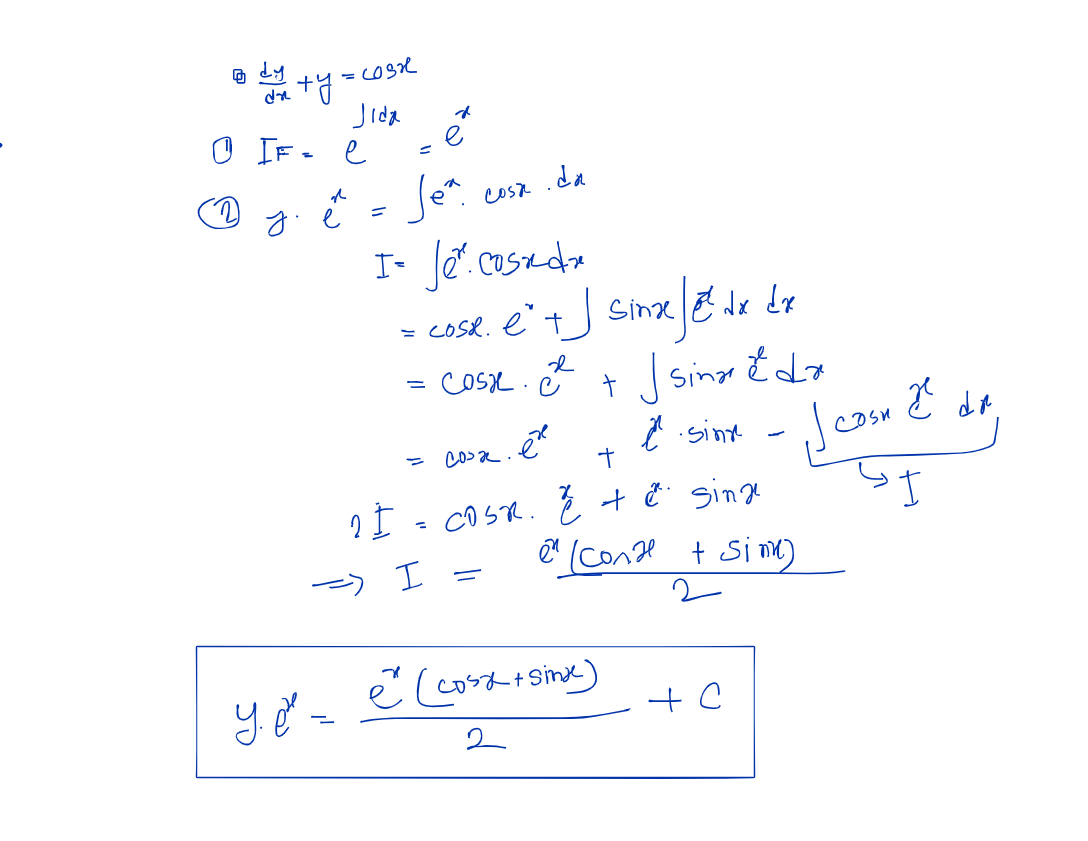
Linear Differentiation Equation:
Definition: If P and Q are only functions of x or constants then the differential equation of the form 𝑑𝑦/𝑑𝑥 +𝑃𝑦 = 𝑄 is called the first order linear differential equation.
Where P and Q are constant or function of x. Then, linear differentiable equation is applicable. Otherwise Separable Method.
Step:
- Integrating Factor =
A given differential equation may not be integrable as such. But it may become integrable when it is multiplied by a function. Such a function is called the integrating factor (I.F).
dx = independent variable. If y is an independent variable then, it would be Pdy.
- General Solution: and Calculate
Problems:
Homogenous Differentiation Equation:
Definition: An equation of the form in which and are homogeneous functions of x and y of the same degree can be reduced to an equation in which variables are separable by putting ,
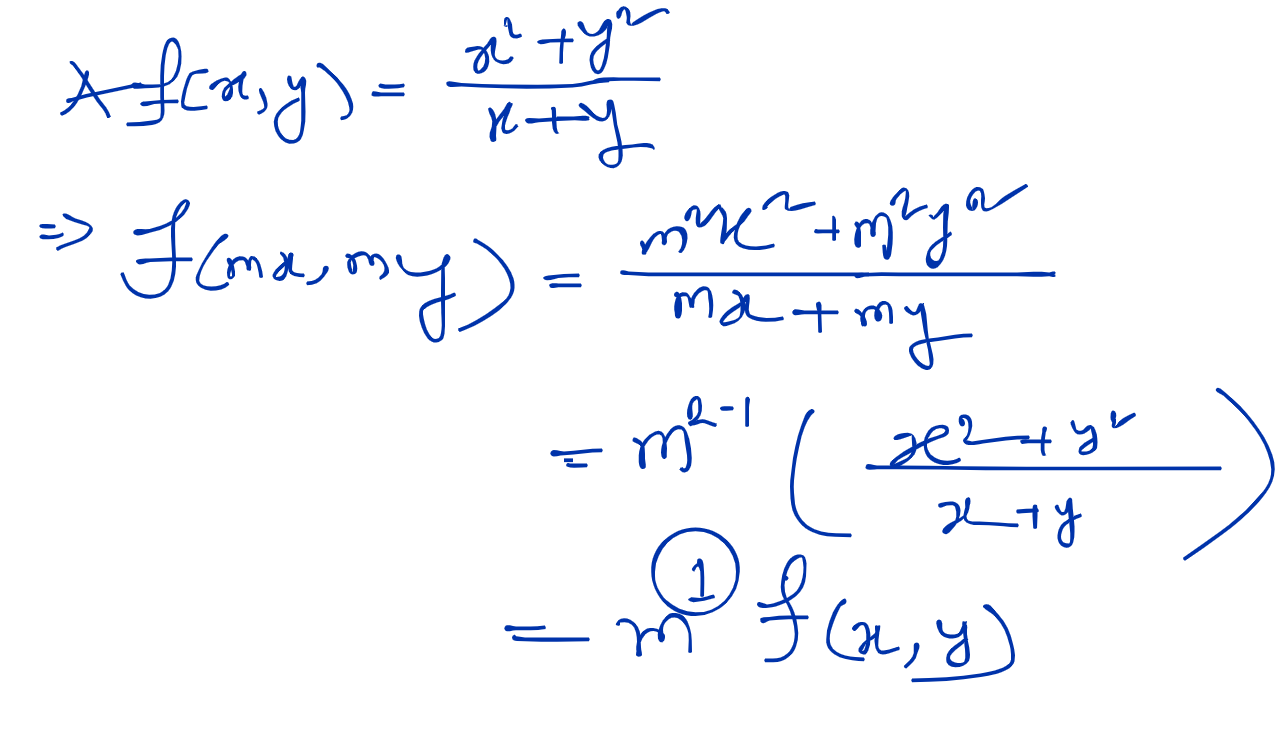
Homogenous Function & It’s Degree: is homogenous function and is the degree of the function then if , where is a non-zero value.
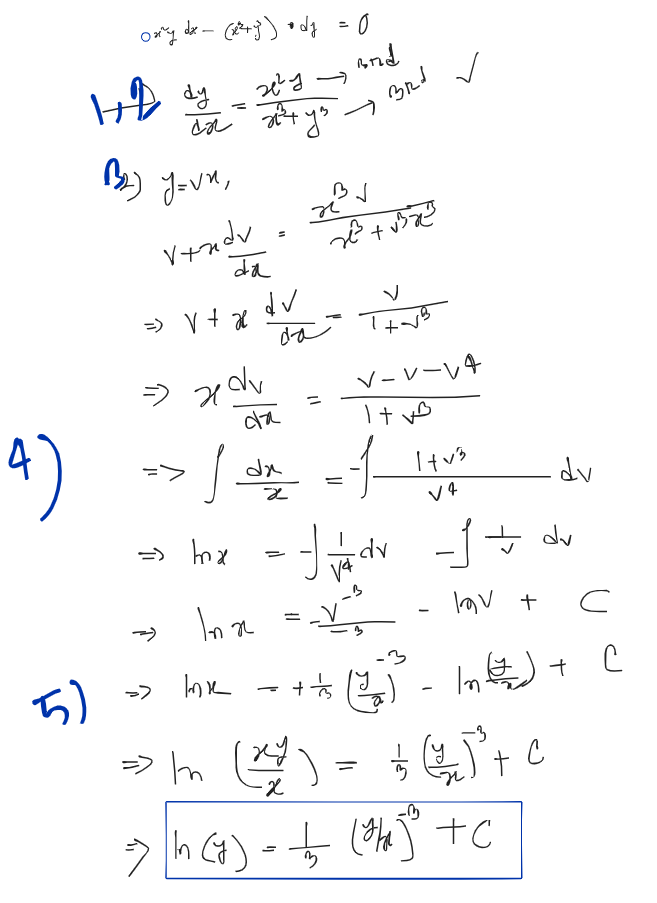
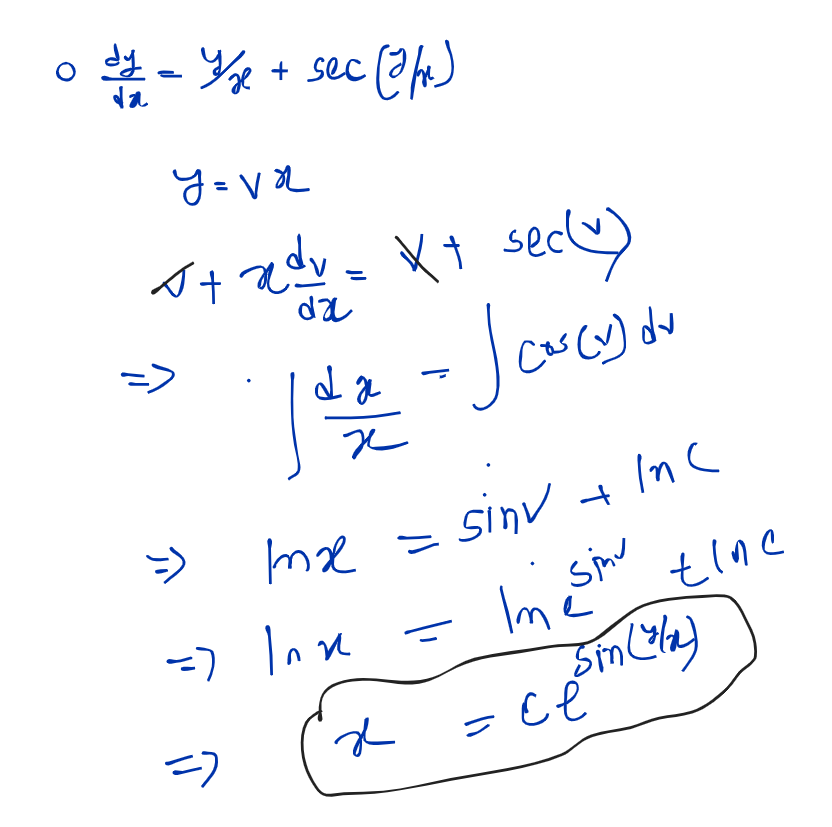
Step to Solve a Homogenous Differentiation Equation:
- Form the equation like
- Check the homogenous of the functions and degree individually, the functions must be homogenous and their degree must be same
- Put int Step (1) equation and
- Apply Variable Separable Method
- Put
Problems:
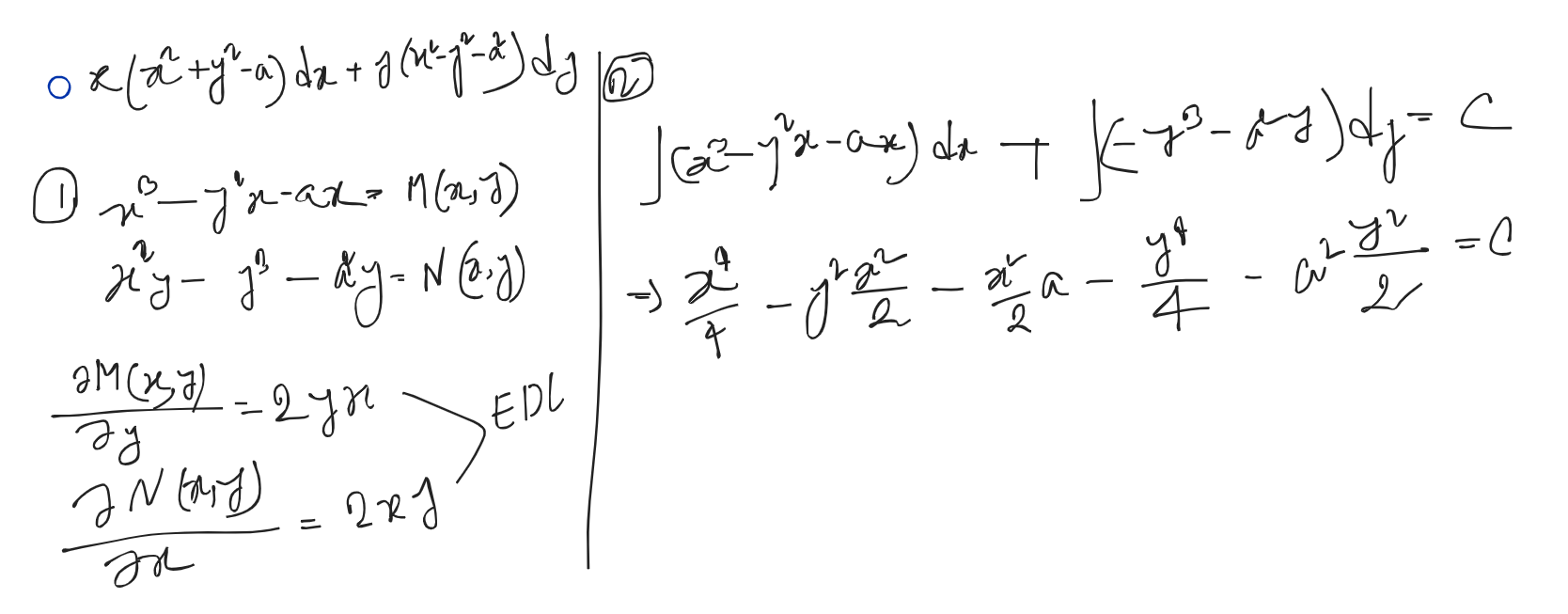
Exact Differentiation Equation:
Definition: the equation will be Exact equation if
[NB: y is constant when diff.w.r.t x and x is constant when diff.w.r.t y]
Steps:
- Check it a exact differentiation or not
- General Solution:
Problems:
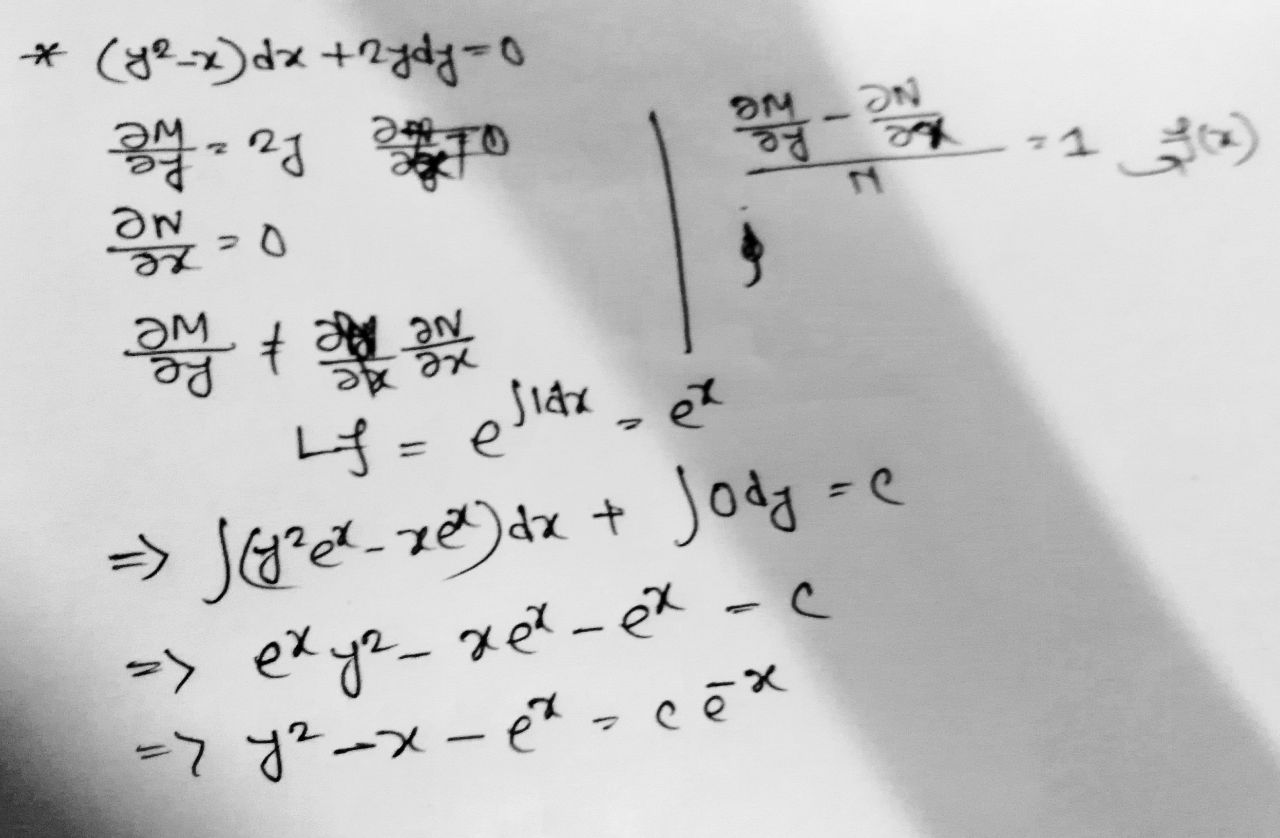
Reducible to Exact Differential Equation:
Steps:
Rule 1:
- Check the equation is exact or not, if not, go to next step
- and it is a function of only x or constant (not any single y) then go to next steps otherwise go to Rule 2
- Integrator factor IF =
- Multiply the equation by the IF, then it is an exact equation now
- Follow the rules of EDE
Correct Ans:
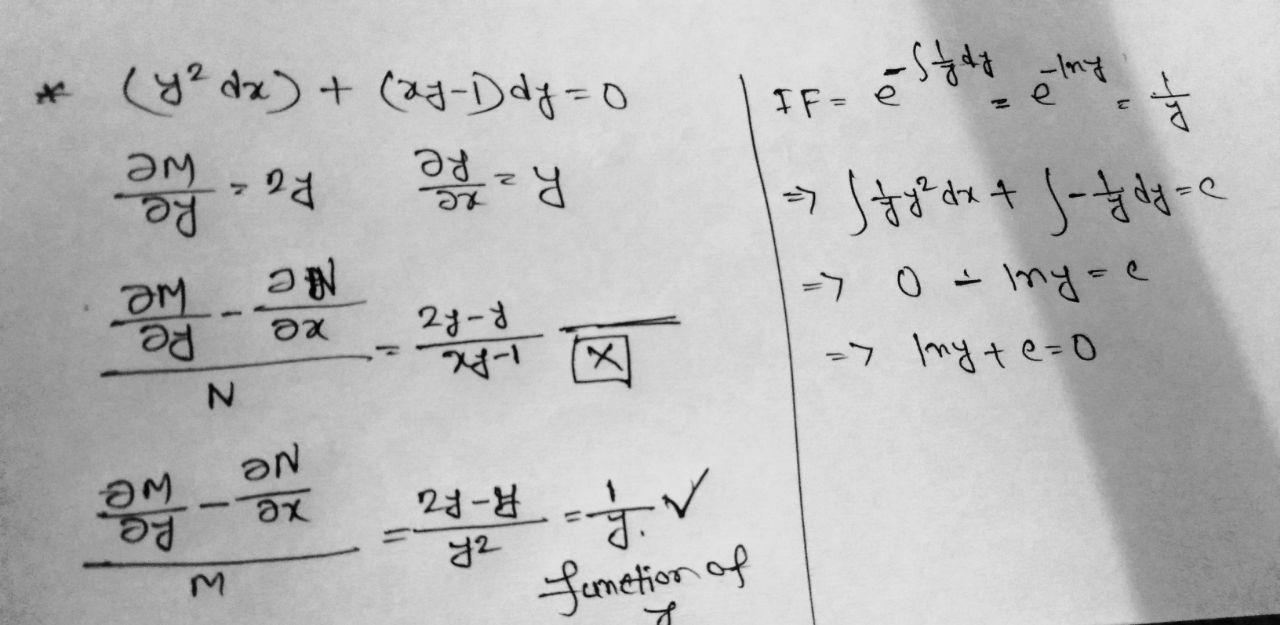
Rule 2:
- Check the equation is exact or not, if not, go to next step
- and it must be a function of only y or constant
- Integrator factor IF = [There’s a minus sign]
- Multiply the equation by the IF, then it is an exact equation now
- Follow the rules of EDE
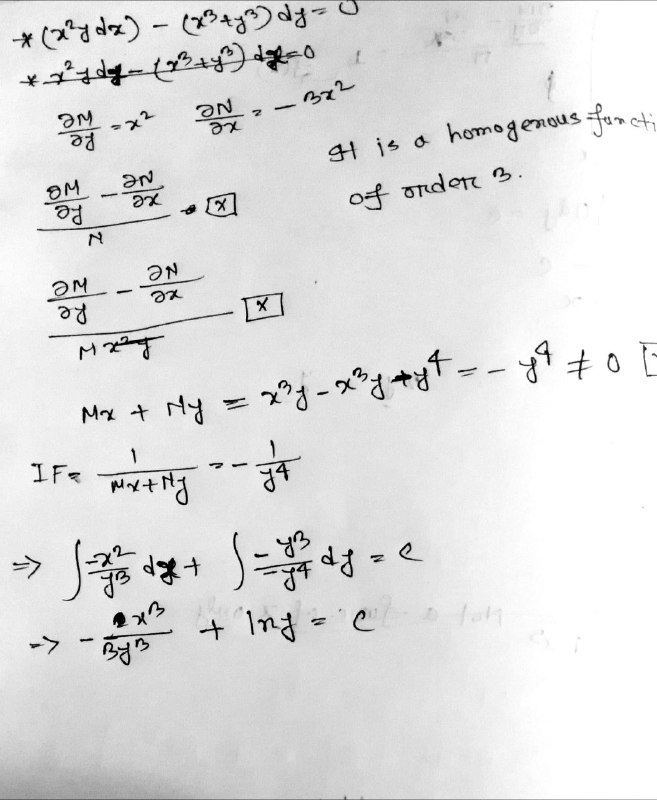
Rules 1: Homogenous Equation
- is a homogenous equation and then,
IF =
Multiply by the IF , then the equation is now an exact equation.
- is a homogenous equation and then,
IF =
Multiply by the IF , then the equation is now an exact equation.
Initial Value Problem:
First Order Equation:
⇒
Linear Differential Equation with Constant Coefficient:
is a Linear Differential Equation if are the function of x or or constant.
If are constant, then it is called Linear Differential Equation with Constant Coefficient.
If right hand side is zero or , then it is called Linear Homogenous Differential Equation.
⇒
1) If ,
Where, CF = Complementary Function
Complementary Function:
- Auxiliary Equation (AE)
Where is an auxiliary equation
- Roots of AE
- Nature of Roots
Rule 1: Roots are real and distinct
Where are roots of the AE.
Rule 2: Roots are real and repeated
Suppose, roots are
Rule 3: Roots are imaginary
1) If
, a function of x
Where, CF = Complementary Function
PI = Particular Integral
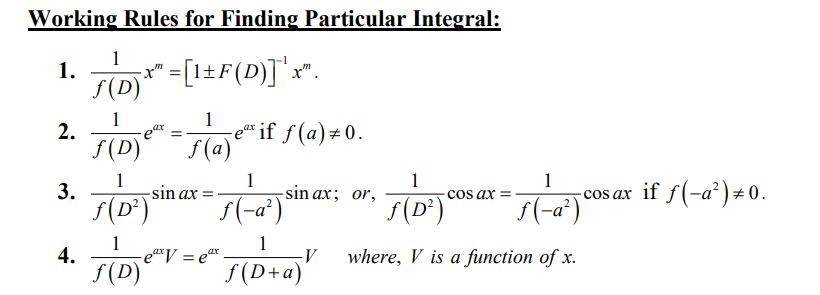
Particular Integral: (NOT AS SIR DID)
Type 1: ,
- CF as Constant Coefficient
-
-
Type 2: ,
- CF as Constant Coefficient
-
-
Type 3:
- CF
- Put
-
-
CT:02
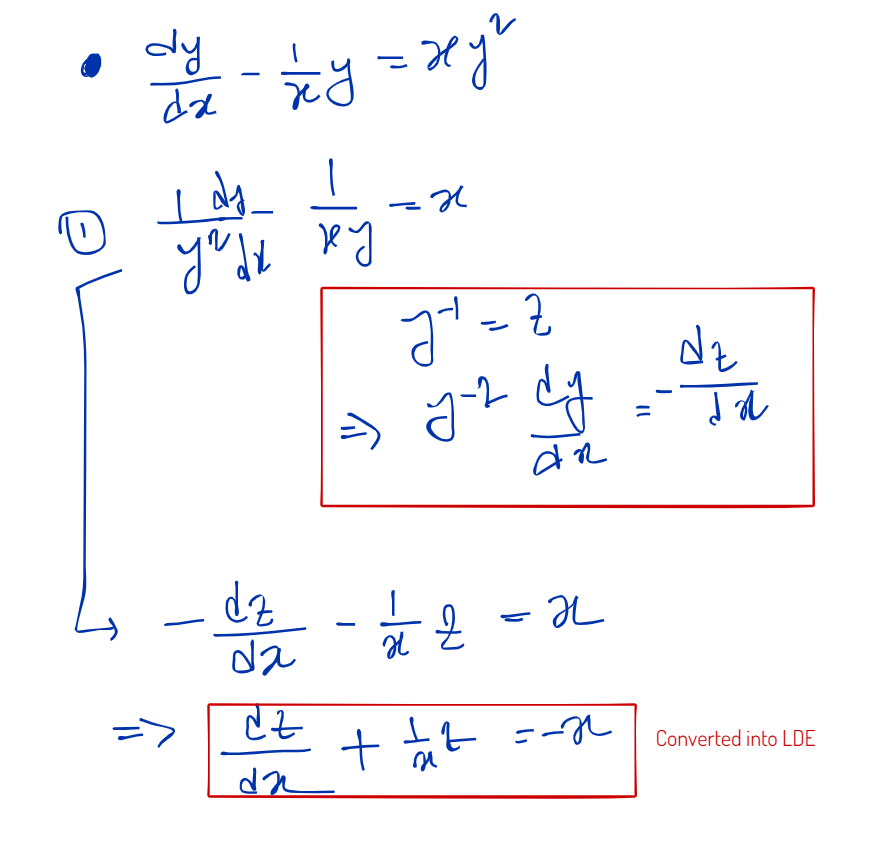
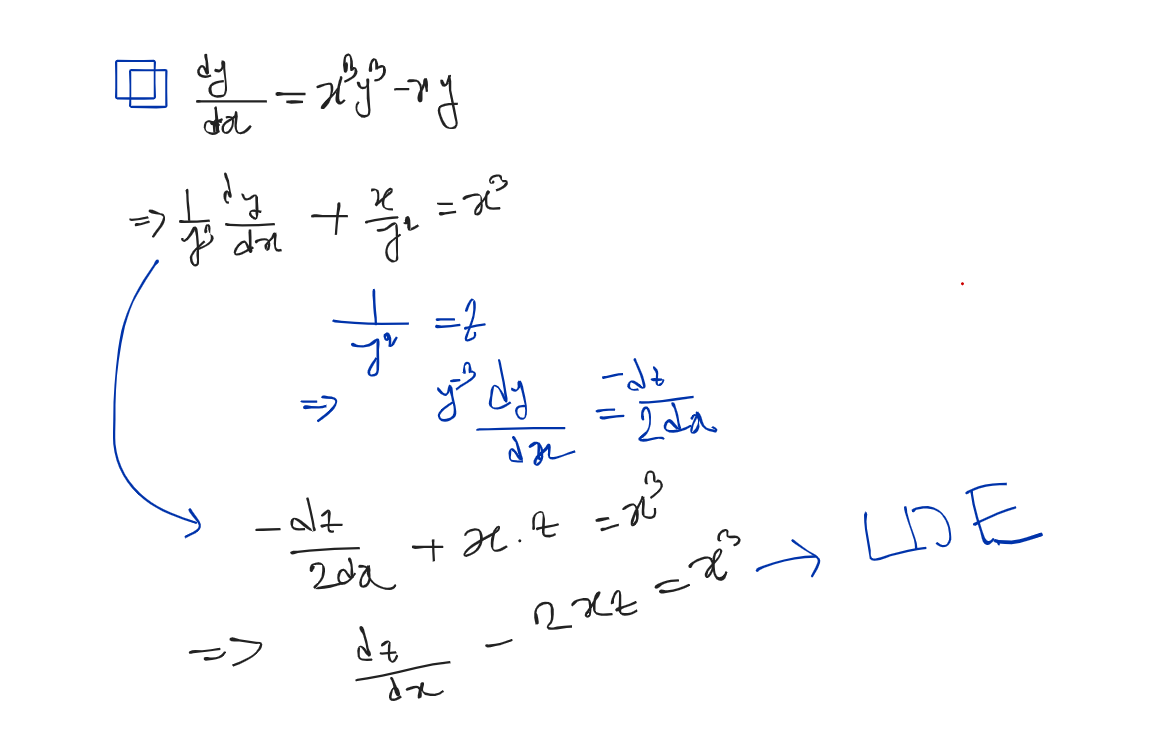
Bernoulli Differential Equation:
Definition: If P and Q are only functions of x or constants, then the differential equation of the form ; is called Bernoulli’s equation
The Bernoulli Differentiation looks like,
How to solve ? → Convert it to LDE. We have to vanish .
Steps:
- Dividing the equation by (besides Q)
- [besides P] and differentiate it w.r.t
- Convert it to LDE
Problems:
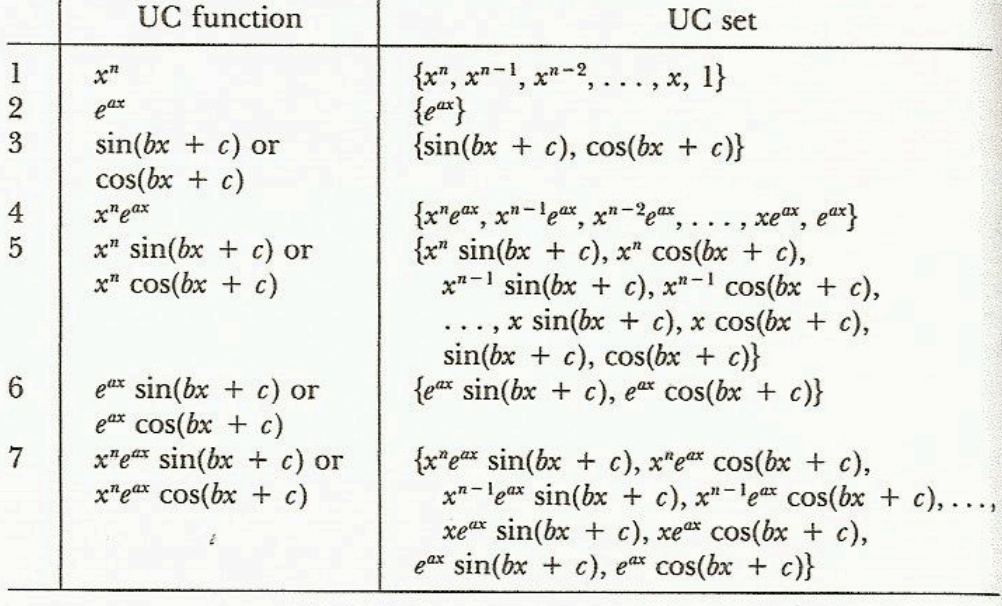
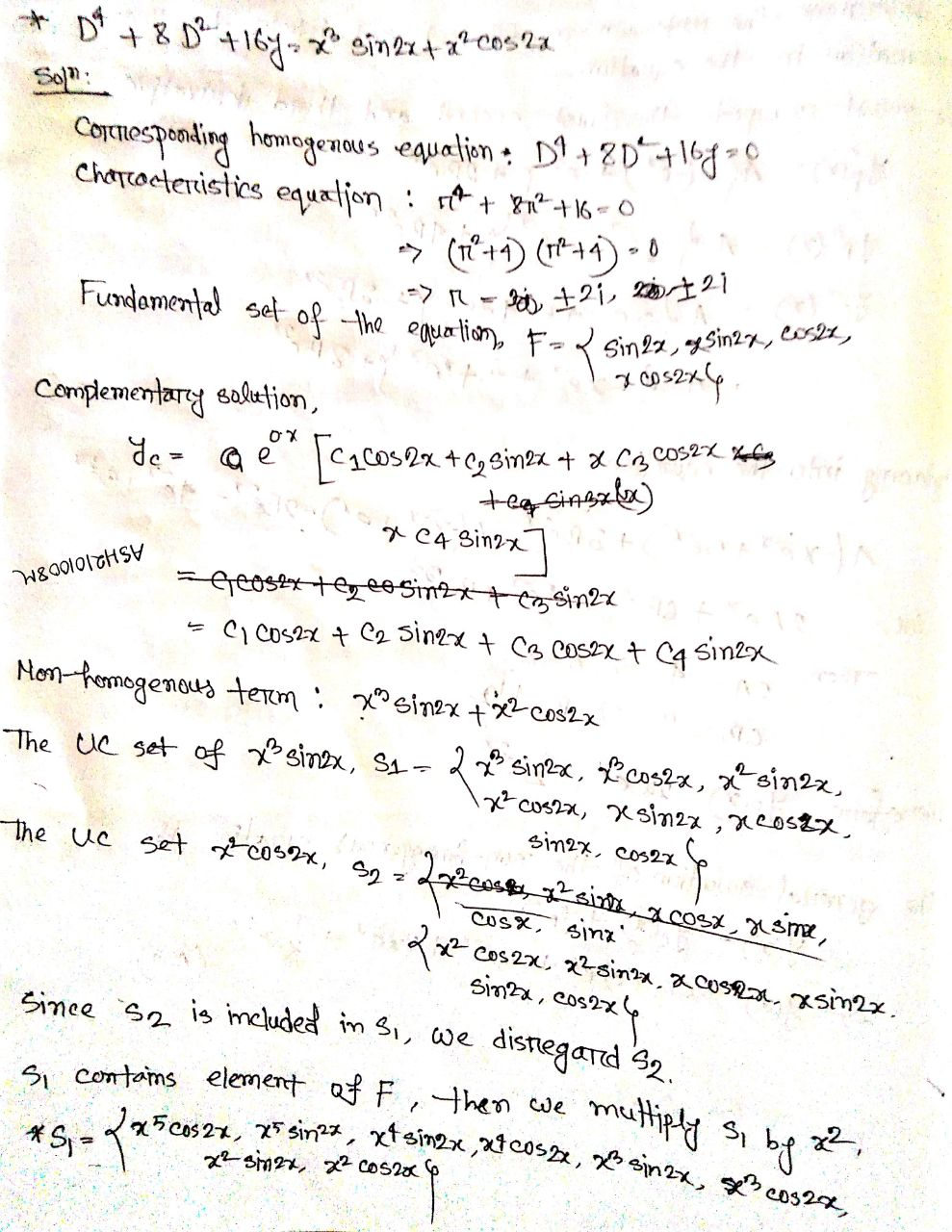
UC Method:
UC Function:
A function is UC function, if it is either
- where
- , where
- , , where
- any function that is a finite product of two or more functions of these three types
UC Set:
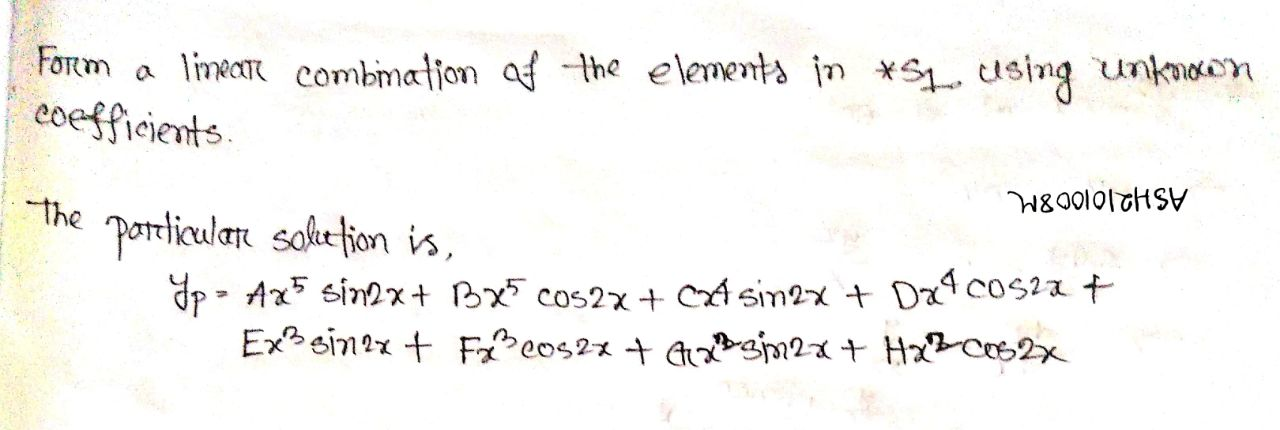
Definition: Given a UC function . We call UC set of , to the set of all UC functions consisting of itself and all linearly independent functions of which the successive derivatives of are either constant multiples or linear combinations.
Problems:
1)
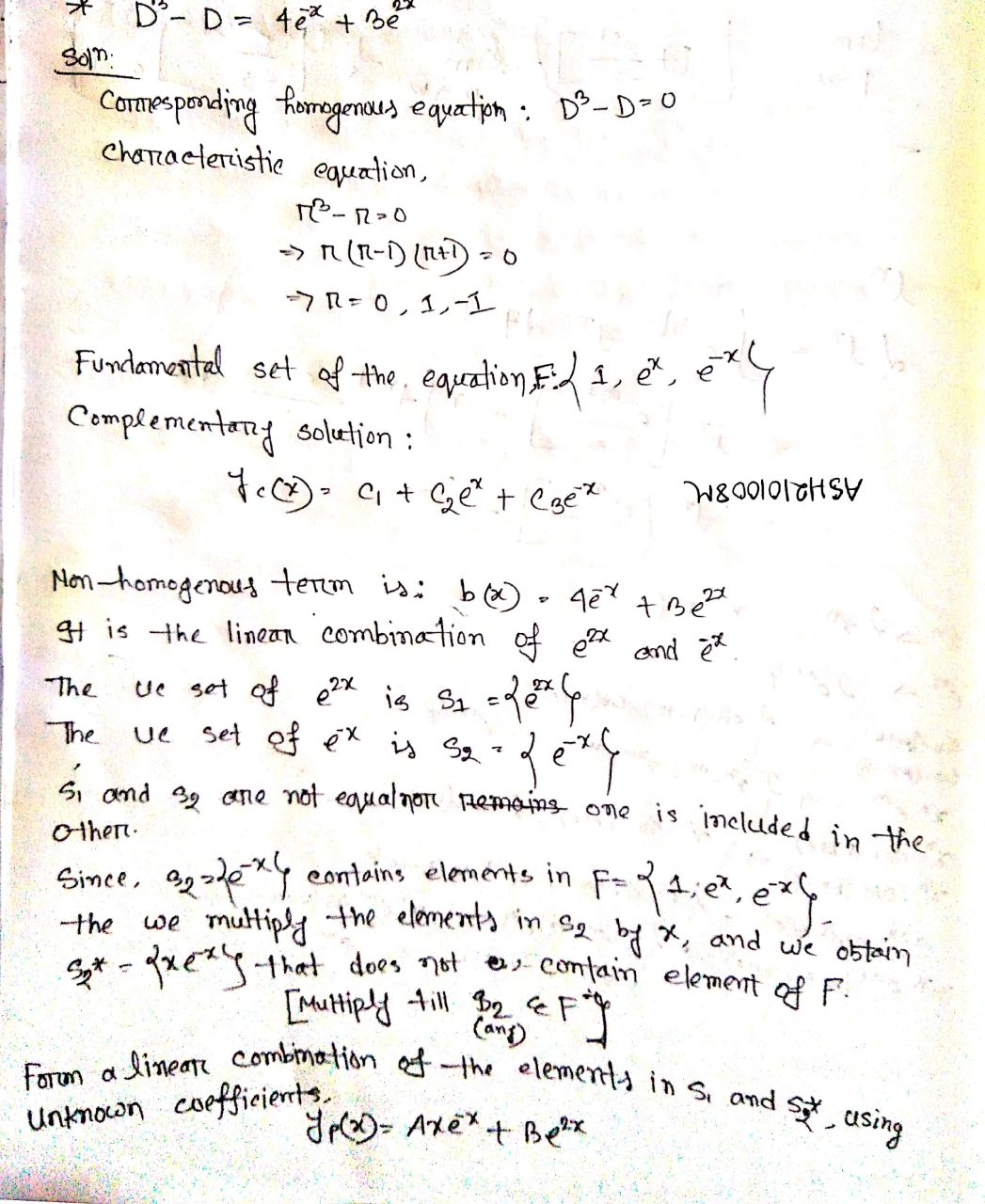
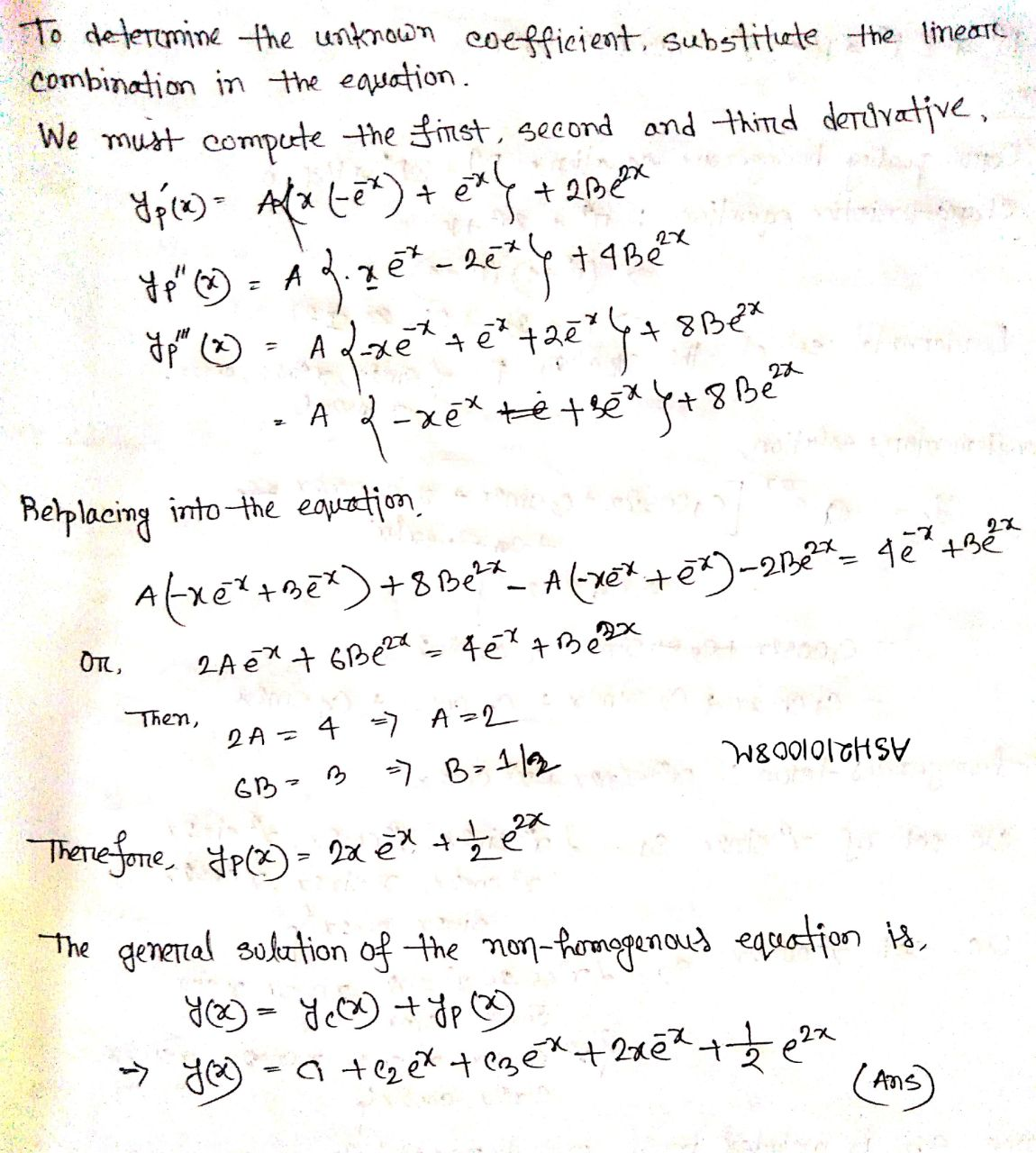
(comparing/equating left-hand side to right –hand side… 2A = 4 ….)
2)
Trajectories:
Trajectories: A curve which cuts every member of a given family of curves is called trajectories.
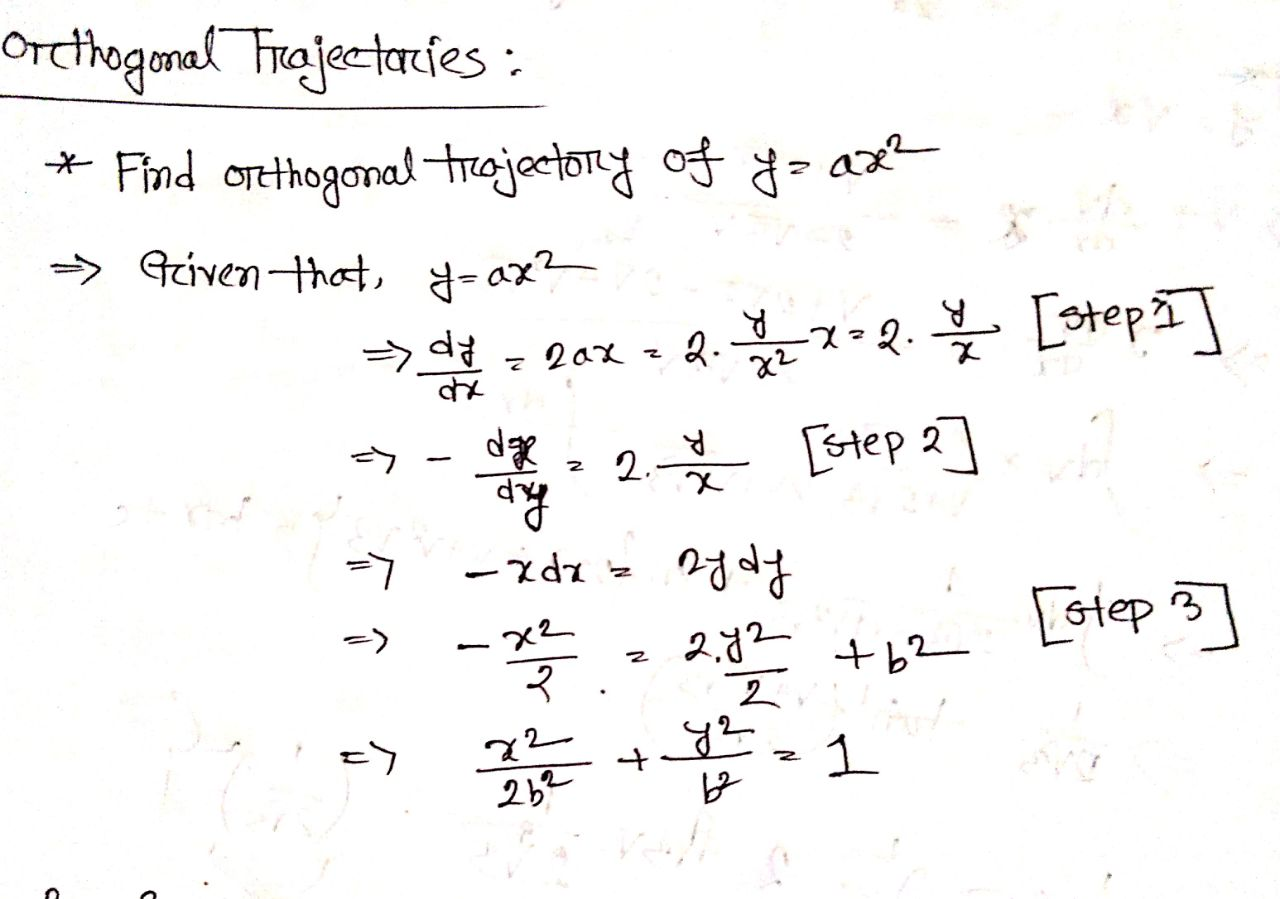
Orthogonal Trajectories: If a curve cuts every member of given family at right angles (), then it is called Orthogonal Trajectory.
Working Rule:
- Differentiate the given equation of family of curve and eliminate parameter/constant
- Replace by
- Solve this new DE and get the orthogonal trajectory
Oblique Trajectory: A curve that intersects the curve of family at a constant angle is called Oblique Trajectories
Working Rule:
- Differentiate the given equation of family of curve and eliminate parameter/constant, denote it as
- and solve the DE
Laplace Transform
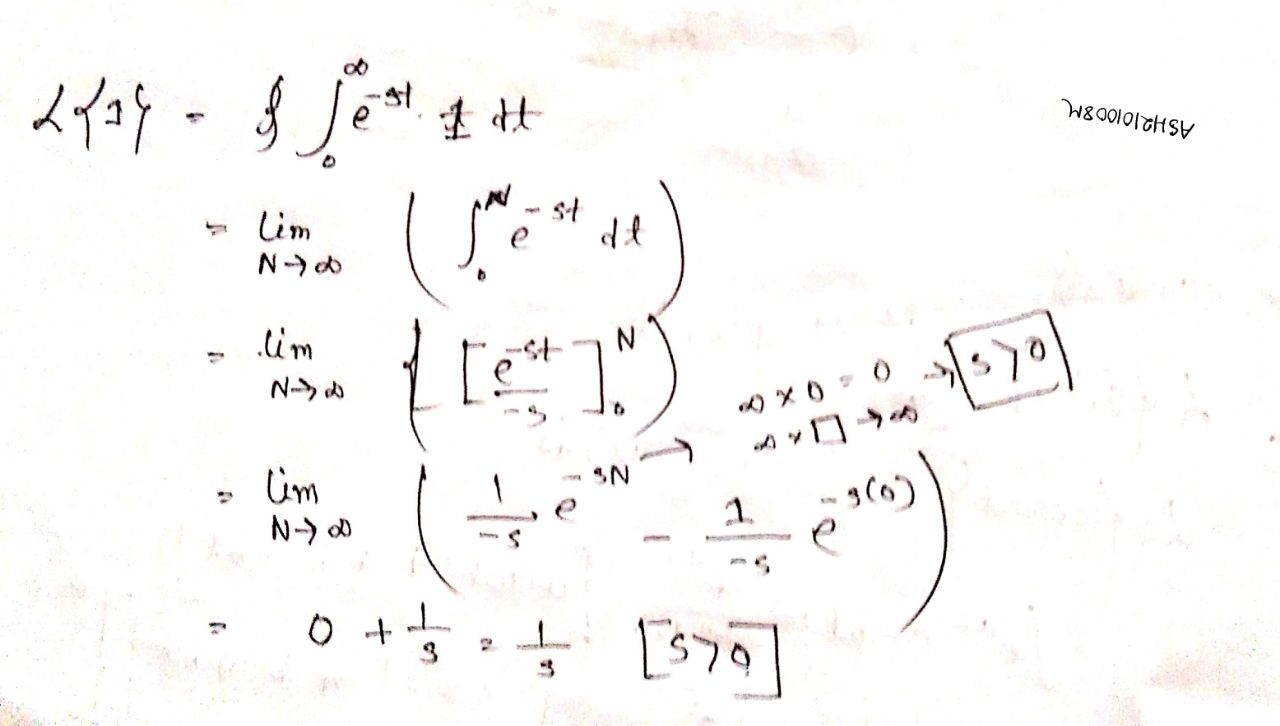
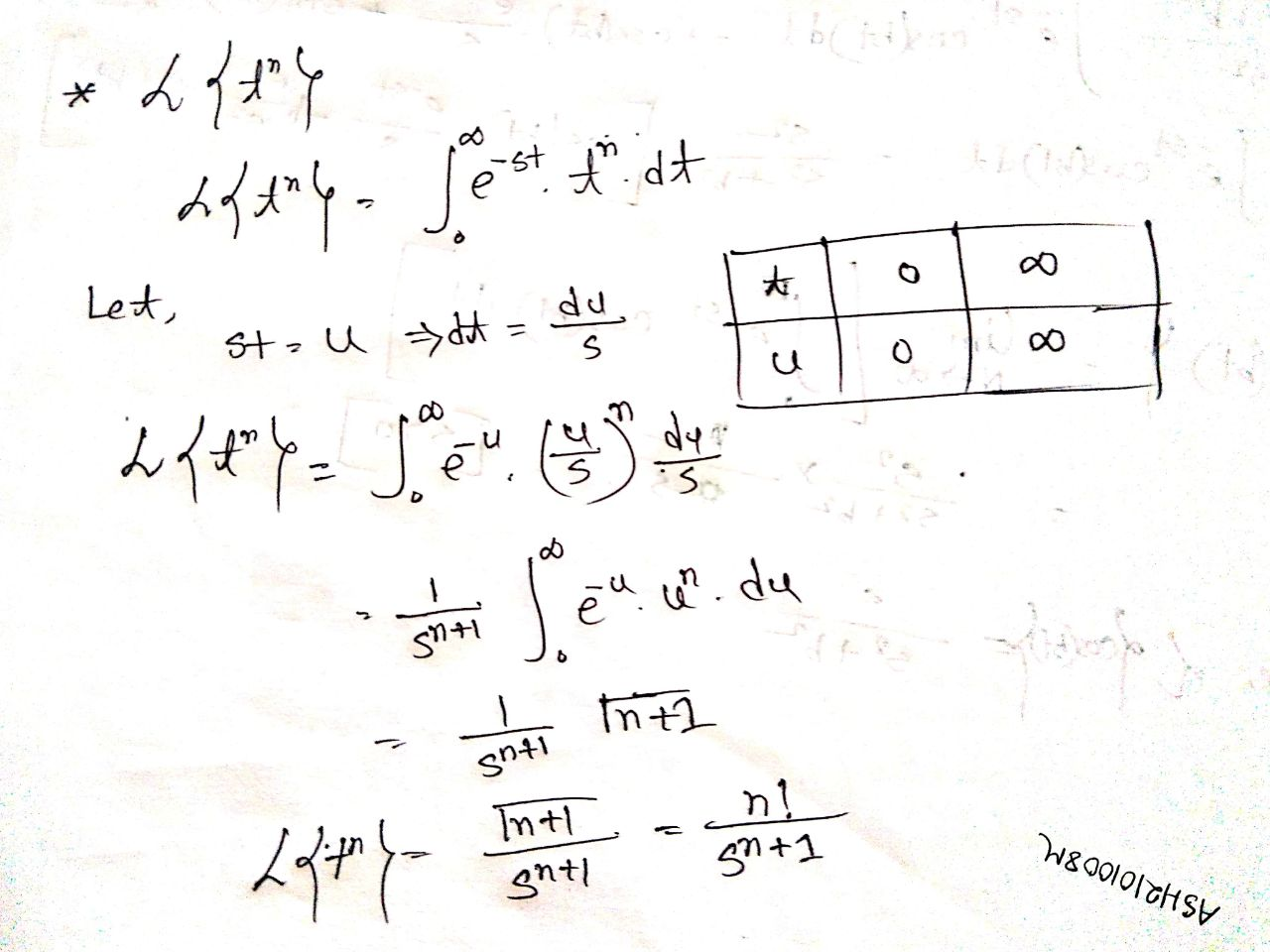
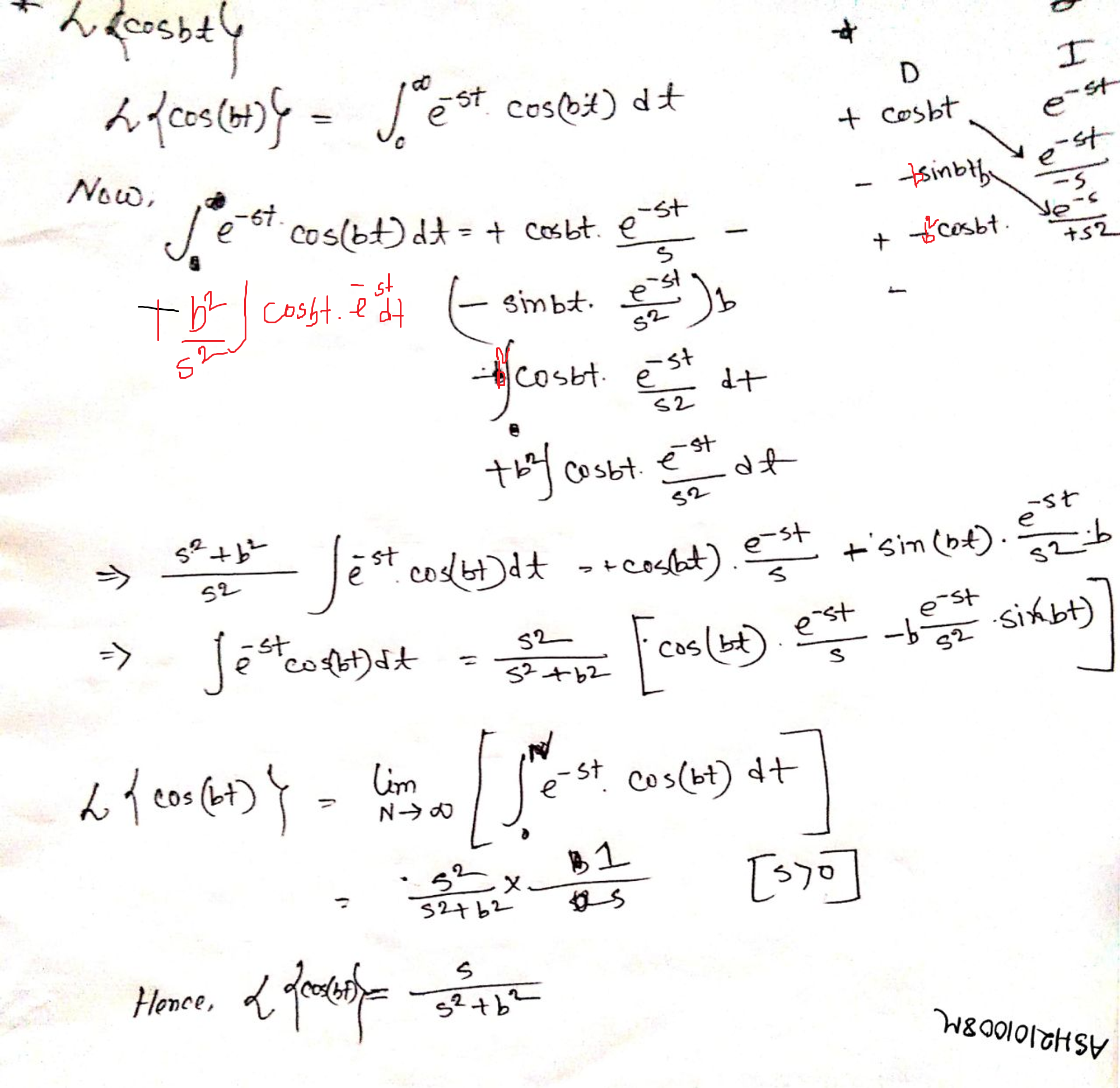
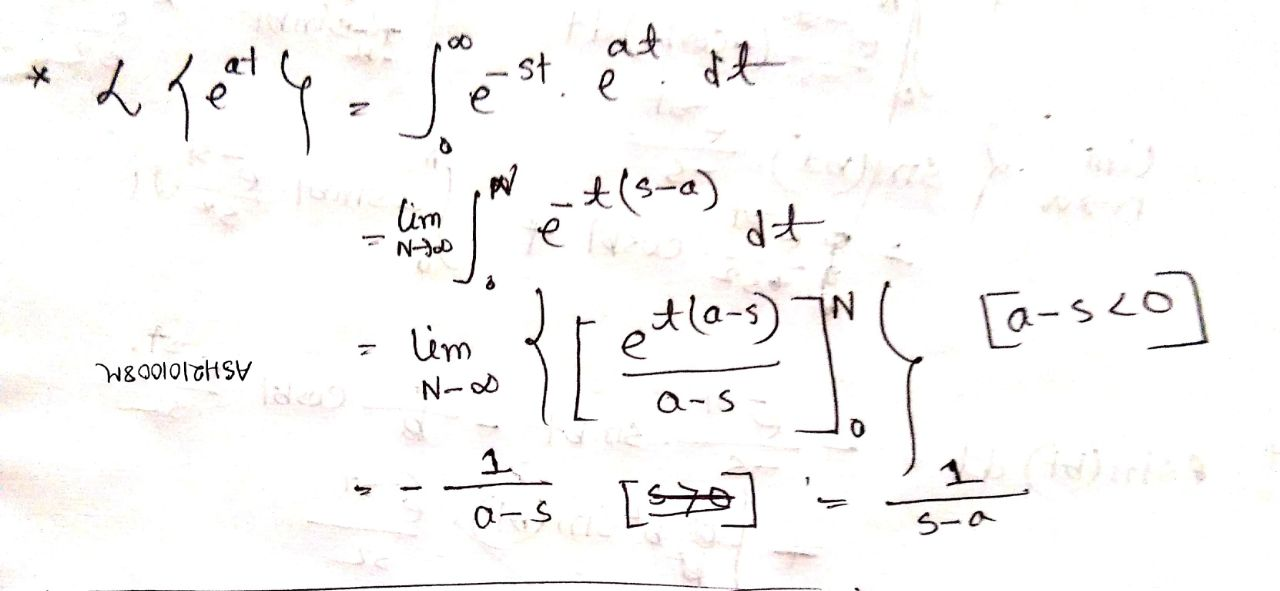
Definition: Let f(t) be a function of t defined for
Then, Laplace transform of f(t) denoted by or , is defined by
Reason why s > 0 || s < 0 || (a-s) < 0 →
Problems: